

A Review of Progresses and Prospects of Human-machine Shared Control Technology for L2 Intelligent Driving Based on Haptic Guidance
-
摘要: 因技术和法规等因素限制,智能汽车短时间内难以实现L1级到L5级的快速跨越,人机共驾将长期存在;基于触觉引导的人机共享控制技术为L2级智能汽车人机共驾提供了有效的人机共享控制途径。通过综述国内外车辆人机共享控制技术相关问题的研究现状,重点分析了基于触觉引导的车道保持、换道、避撞、倒车辅助等人机共享控制在路径规划、意图决策和权限分配转移等过程中,可能会造成人机冲突进而导致车辆稳定性降低、行车安全性变差和驾驶员操作舒适度与自由度恶化等关键问题。同时针对人机共享控制中固有的驾驶人风格及认知差异进行了探讨,以期进一步明确人机共享控制器的设计方法及人机冲突产生的机理。提出未来应在大量仿真或实测行车数据的基础上不断迭代优化智能系统,提高智能控制系统对行车环境和驾驶人状态识别的精准度,从而合理分配人机共享控制权重,有效解决人机冲突、车辆稳定性、行车安全性、驾驶员操作舒适性和自由度等问题。基于现有研究存在的问题,指出自适应性触觉引导共享控制器、权重分配共享控制器、基于神经肌肉反应共享控制器及基于高级辅助驾驶系统共享控制器等将是智能汽车人机共享控制的主要研究方向。Abstract: It is nearly impossible for intelligent automobiles to achieve a fast upgradation from L1 to L5 in a short time due to the limitations of technologies, regulations, and other factors. Thus, human-machine shared driving will be the case for a long run. The human-machine shared control (HMSC) technology based on haptic guidance provides an effective way for intelligent automobiles operating at the L2 level. Through reviewing the literature regarding the current progress of HMSC technology, this study focuses on studying conflicts created over the human-machine collaboration in the process of route planning, intention commitment, and control assignment related to the maneuvers like lane keeping, lane changing, collision avoidance and backing-up, which may result in reduced vehicle stability, poor driving safety, and deteriorated operating comfort and freedom. Meanwhile, the driving styles and cognition differences of drivers are studied to identify the design methods of human-machine shared controller and the mechanism of human-machine conflict. Therefore, it is proposed that the intelligent driving system should be iteratively optimized base on massive simulated or measured driving data in the future and the accuracy of the intelligent driving system in recognizing driving environment and driver's status should be improved. In this way, the control weights of human and machine can be assigned and the problems of control conflict, vehicle stability, driving safety, deteriorated operating comfort and degree of freedom can be solved. Based on the existing issues identified within the research to date, it is pointed out that shared controllers based on the adaptive haptic-guidance, assignment of control weight, neuromuscular response, and advanced assistance systems are major research directions of the HMSC.
-

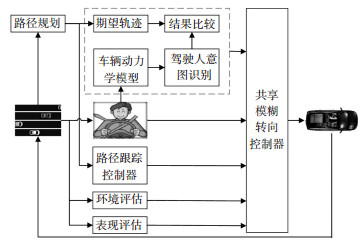
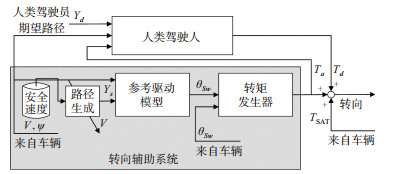
图 3 基于模型预测控制的车辆换道人机共享控制框架
Figure 3. Vehicle lane change sharing control framework based on model predictive control

图 4 前向避撞共享控制系统框架
Figure 4. Forward collision avoidance sharing control system framework

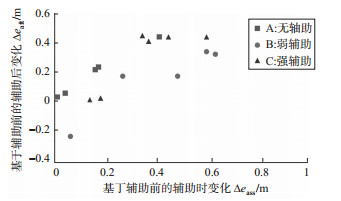
图 6 辅助期间和辅助后误差减少的关系
Figure 6. Relationship between error reduction during and after assistance

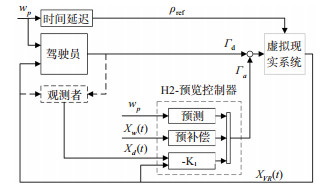
图 7 基于风险预测的人机共享控制框图
Figure 7. The block diagram of human-machine shared control based on risk prediction
表 1 交互转矩选取假设
Table 1. Interaction torque selection hypothesis
HSC调节的假设驱动程序任务 驾驶人肌肉神经任务 紧急任务(NH)
最高匹配引导转矩一般任务(FT)
更高匹配引导转矩放松任务(RT)
基本匹配引导转矩NH(低HSC转矩) 刚好匹配 HSC转矩太低 HSC转矩太低 FT(中等HSC转矩) HSC转矩过高 刚好匹配 HSC转矩太低 RT(高HSC转矩) HSC转矩过高 HSC转矩过高 刚好匹配  下载: 导出CSV
下载: 导出CSV
-
[1] 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. doi: 10.3969/j.issn.1674-8484.2017.01.001LI K Q, DAI Y F, LI S B, et al. Development status and trend of intelligent networked vehicle(ICV)technology[J]. Journal of Automotive Safety and Energy Conservation, 2017, 8(1): 1-14. (in Chinese) doi: 10.3969/j.issn.1674-8484.2017.01.001 [2] 吴超仲, 吴浩然, 吕能超. 人机共驾智能汽车的控制权切换与安全性综述[J]. 交通运输工程报, 2018, 18(6): 131-141. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201806019.htmWU C Z, WU H R, LYU N C. Review of control switch and safety of human-computer driving intelligent vehicle[J]. Journal of Traffic and Transportation Engineering, 2018, 18(6): 131-141. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201806019.htm [3] 徐筱秦, 冯忠祥, 李靖宇. 驾驶人接管自动驾驶车辆研究进展[J]. 交通信息与安全, 2019, 37(5): 1-8. doi: 10.3963/j.issn.1674-4861.2019.05.001XU X Q, FENG Z X, LI J Y. Research progress of driver taking over autonomous vehicles[J] Journal of Transport Information and Safety, 2019, 37(5): 1-8. (in Chinese) doi: 10.3963/j.issn.1674-4861.2019.05.001 [4] 宗长富, 代昌华, 张东. 智能汽车的人机共驾技术研究现状和发展趋势[J]. 中国公路学报, 2021, 34(6): 214-237. doi: 10.3969/j.issn.1001-7372.2021.06.021ZONG C F, DAI C H, ZHANG D. Research status and development trend of man-machine driving technology of intelligent vehicles[J]. Chinese Journal of Highway, 2021, 34(6): 214-237. (in Chinese) doi: 10.3969/j.issn.1001-7372.2021.06.021 [5] 何仁, 赵晓聪, 杨奕彬, 等. 基于驾驶人风险响应机制的人机共驾模型[J]. 吉林大学学报(工学版), 2021, 51(3): 799-809. doi: 10.13229/j.cnki.jdxbgxb20200092HE R, ZHAO X C, YANG Y B. Man-machine shared driving model using risk-response mechanism of human driver[J] Journal of Jilin University(Engineering Edition), 2021, 51(3): 799-809(in Chinese) doi: 10.13229/j.cnki.jdxbgxb20200092 [6] 胡云峰, 曲婷, 刘俊, 等. 智能汽车人机协同控制的研究现状与展望[J]. 自动化学报, 2019, 45(7): 1261-1280. doi: 10.16383/j.aas.c180136HU Y F, QU T, LIU J, et al. Research status and prospect of human-computer cooperative control of intelligent vehicles[J]. Journal of Automation, 2019, 45(7): 1261-1280. (in Chinese) doi: 10.16383/j.aas.c180136 [7] CHEN W W, WANG W X, WANG K W, et al. Lane departure warning systems and lane line detection methods based on image processing and semantic segmentation: A review[J]. Journal of Traffic and Transportation Engineering(English Edition), 2020, 7(6): 748-774. doi: 10.1016/j.jtte.2020.10.002 [8] GRIFFITHS P, GILLESPIE R B. Shared control between human and machine: Haptic display of automation during manual control of vehicle heading[C]. 12th International Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Chicago, USA: IEEE, 2004. [9] FORSYTH B A C, MACLEAN K E. Predictive haptic guidance: intelligent user assistance for the control of dynamic tasks[J]. IEEE Transactions on Visualization and Computer Graphics, 2006, 12(1): 103-113. doi: 10.1109/TVCG.2006.11 [10] MULDER M, ABBINK D A, BOER E R. The effect of haptic guidance on curve negotiation behavior of young, experienced drivers[C]. 2008 IEEE International Conference on Systems, Man and Cybernetics, Singapore: IEEE, 2008. [11] YU L Y, ABI L, LU Z H, et al. Shared control strategy for vehicle stability on u-split road[C]. International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Anaheim, USA: American Society of Mechanical Engineers, 2019. [12] SALEH L, CHEVREL P, CLAVEAU F, et al. Shared steering control between a driver and an automation: stability in the presence of driver behavior uncertainty[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(2): 974-983. doi: 10.1109/TITS.2013.2248363 [13] 曾玮攀. 基于人机共驾的转向辅助系统控制研究[D]. 长沙: 湖南大学, 2019.ZENG W P. Research on steering assist system control based on man-machine driving[D]. Changsha: Hunan University, 2019. (in Chinese) [14] MARS F, SALEH L, CHEVREL P, et al. Modeling the visual and motor control of steering with an eye to shared-control automation[C]. The Human Factors and Ergonomics Society Annual Meeting, Los, USA: SAGE Publications, 2011. [15] SALEH L, CHEVREL P, MARS F, et al. Shared steering control between a driver and an automation: Stability in the presence of driver behavior uncertainty[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(2): 974-983. doi: 10.1109/TITS.2013.2248363 [16] MARS F, DEROO M, CHARRON C. Driver adaptation to haptic shared control of the steering wheel[C]. 2014 IEEE International Conference on Systems Man, and Cybernetics (SMC), San Diego, USA: IEEE, 2014. [17] WINTER J, DODOU D. Preparing drivers for dangerous situations: A critical reflection on continuous shared control[C]. 2011 IEEE International Conference on Systems Man, and Cybernetics (SMC), Anchorage, USA: IEEE, 2011. [18] 谈东奎. 人机共享的驾驶人横向辅助系统关键技术研究[D]. 合肥: 合肥工业大学, 2017.TAN D K. Research on key technologies of driver lateral assistance system shared by man and machine[D]. Hefei: Hefei University of Technology, 2017. (in Chinese) [19] TSOI K K, MULDER M, ABBINK D A. Balancing safety and support: Changing lanes with a haptic lane-keeping support system[C]. 2010 IEEE International Conference on Systems, Man and Cybernetics, Istanbul, Turkey: IEEE, 2010. [20] TALAMONTI W J. Human-machine interface development for modifying driver lane change behavior in manual, automated, and shared control automated driving[D]. Detroit: Wayne State University, 2017. [21] NISHIMURA R, WADA T, SUGIYAMA S. Haptic shared control in steering operation based on cooperative status between a driver and a driver assistance system[J]. Journal of Human-Robot Interaction, 2015, 4(3): 19-37. doi: 10.5898/4.3.Nishimura [22] ABBINK D A, CLEIJ D, MULDER M, et al. The importance of including knowledge of neuromuscular behaviour in haptic shared control[C]. 2012 IEEE International Conference on Systems, Man, and Cybernetics(SMC), Seoul, the Republic of Korea: IEEE, 2012. [23] BENLOUCIF M A, POPIEUL J C, SENTOUH C. Multi-level cooperation between the driver and an automated driving system during lane change maneuver[C]. 2016 IEEE Intelligent Vehicles Symposium(Ⅳ), Gothenburg, Sweden: IEEE, 2016. [24] GUO C S, SENTOUH C, POPIEUL J C, et al. Predictive shared steering control for driver override in automated driving: A simulator study[J]. Transportation Research Part F: Psychology and Behaviour, 2019, 61(1): 326-336. [25] YAN Z H, YANG K M, WANG Z, et al. Intention-based lane changing and lane keeping haptic guidance steering system[J]. IEEE Transactions on Intelligent Vehicles, 2020, 6(4): 622-633. [26] ABI L, JIN DAFENG, XIONG CENBO, et al. Shared control strategy based on trajectory following and driver intention optimization[J]. Proceedings of the Institution of Mechanical Engineers, 2021(9): 2605-2617. [27] MULDER M, ABBINK D A. Correct and faulty driver support from shared haptic control during evasive maneuvers[C]. 2011 IEEE International Conference on Systems, Man, and Cybernetics, Anchorage, USA: IEEE, 2011. [28] ERLIEN S M, FUJITA S, GERDES J C. Shared steering control using safe envelopes for obstacle avoidance and vehicle stability[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 17(2): 441-451. [29] VREUGDENHIL W, BARENDSWAARD S, ABBINK D A, et al. Complementing haptic shared control with visual feedback for obstacle avoidance[C]. 14th IFAC Symposium on Analysis, Design, and Evaluation of Human-Machine Systems HMS 2019, Tallinn, Estonia: IFAC, 2019. [30] BALACHANDRAN A, BROWN M, ERLIEN S M, et al. Creating predictive haptic feedback for obstacle avoidance using a model predictive control (MPC) framework[C]. 2015 IEEE Intelligent Vehicles Symposium(Ⅳ), Seoul, the Republic of Korea: IEEE, 2015. [31] LI M J, CAO H T, SONG X L, et al. Shared control driver assistance system based on driving intention and situation assessment[J]. IEEE Transactions on Industrial Informatics, 2018, 14(11): 4982-4994. doi: 10.1109/TII.2018.2865105 [32] 张玉峰. 驾驶人状态检测及其在人机共驾中的应用[D]. 重庆: 重庆大学, 2019.ZHANG Y F. Driver state detection and its application in man-machine driving[D]. Chongqing: Chongqing University, 2019. (in Chinese) [33] HIRAOKA T, MOTOMURA Y. Advanced driver assistance system by combination of avoidance guidance based on haptic shared control and automatic collision avoidance control[J]. Transactions of Society of Automotive Engineers of Japan, 2019, 50(3): 897-903. [34] GRAY A, ALI M, GAO Y, et al. Semi-autonomous vehicle control for road departure and obstacle avoidance[J]. IFAC Control of Transportation Systems, 2012, 18(6): 1-6. [35] JI X W, YANG K M, NA X X, et al. Feedback game-based shared control scheme design for emergency collision avoidance: A fuzzy-linear quadratic regulator approach[J]. Journal of Dynamic Systems, Measurement, and Control, 2019, 141(8): 081005-081018. doi: 10.1115/1.4042880 [36] GUO H Y, SONG L H, LIU J, et al. Hazard- evaluation-oriented moving horizon parallel steering control for driver-automation collaboration during automated driving[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5(6): 1062-1073. [37] TADA S, WADA T. Effect of skill development of haptic shared control in backward parking assist[C]. 2015 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Yokohama, Japan: IEEE, 2015. [38] TADA S, WADA T. Haptic shared control for backward parking and its effect on skill increase in novice drivers[C]. 2015 IEEE/SICE International Symposium on System Integration (SⅡ), Nagoya, Japan: IEEE, 2015. [39] WADA T. Simultaneous achievement of driver assistance and skill development in shared and cooperative controls[J]. Cognition, Technology & Work, 2019, 21(4): 631-642. [40] WADA T, SONODA K, TADA S. Simultaneous achievement of supporting human drivers and improving driving skills by shared and cooperative control[C]. 13th IFAC Symposium on Analysis, Design, and Evaluation of Human-Machine Systems HMS 2016, Kyoto, Japan: IFAC, 2016. [41] TADA S, SONODA K, WADA T. Simultaneous achievement of workload reduction and skill enhancement in backward parking by haptic guidance[J]. IEEE Transactions on Intelligent Vehicles, 2016(4): 292-301. [42] RATH J J, SENOUTH C, POPIEUL J C. Personalised lane keeping assist strategy: adaptation to driving style[J]. IET Control Theory & Applications, 2019, 13(1): 106-115. [43] BARENDSWAARD S. Modelling individual driver trajectories to personalise haptic shared steering control in curves[D]. Delft: Delft University of Technology, 2021. [44] INOUE S, AIKAWA H, INOUE H. Study on human-machine shared driving system using DYC and steering assistance(second report)[J]. Transactions of Society of Automotive Engineers of Japan, 2017, 48(1): 111-117. [45] SAITO Y, MITSUMOTO T, RAKSINCHAROENSAK P. Effectiveness of a risk predictive shared steering control based on potential risk prediction of collision with vulnerable road users[C]. 13th IFAC Symposium on Analysis, Design, and Evaluation of Human-Machine Systems HMS 2016, Kyoto, Japan: IFAC, 2016. [46] MULDER M, ABBINK D A. Sharing control with elderly drivers: Haptic guidance during curve negotiation[C]. 11th IFAC/IFIP/IFORS/IEA Symposium on Analysis, Design, and Evaluation of Human-Machine Systems, Valenciennes, France: IFAC, 2010. [47] 夏文旭. 基于人机共驾的车道保持控制系统的研究[D]. 大连: 大连理工大学, 2019.XIA W X. Research on lane keeping control system based on man-machine driving[D]. Dalian: Dalian University of Technology, 2019. (in Chinese) [48] 胡满江, 边有钢, 许庆, 等. 自适应驾驶人行为特征的车道偏离防范系统[J]. 汽车工程, 2017, 39(10): 1152-1157.HU M J, BIAN Y G, XU Q, et al. Lane departure prevention system with adaptive driver behavior characteristics[J]. Automotive Engineering, 2017, 39(10): 1152-1157. (in Chinese) [49] WANG W S, NA X X, CAO D P, et al. Decision-making in driver-automation shared control: A review and perspectives[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1289-1307. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 1076
- HTML全文浏览量: 486
- PDF下载量: 50
- 被引次数: 0